
FLEX Series Parallel Jaw Grippers Kitagawa
Hand-E is our first translational gripper. It's got many of the advantages of our popular 2-Finger Adaptive Grippers — which we've been building for 10 years — but with the added bonus of being a highly customizable parallel gripper suited to precision applications. We understand if you're a bit apprehensive about this new gripper.

Parallel Gripper P5GW Series (3 jaw centering) ParkerCA
This paper introduces a novel underactuated anthropomorphic gripper for prosthetic applications. In order to extend the grasping capabilities of underactuated prosthetic grippers and improve the force transmission ratio, a mechanical lever is mounted inside the palm that allows a proper distribution of the forces and provides mechanical advantage. A static model is developed and the.
Parallel grippers Röhm clamping devices drill chucks, lathe chucks, HSK tools
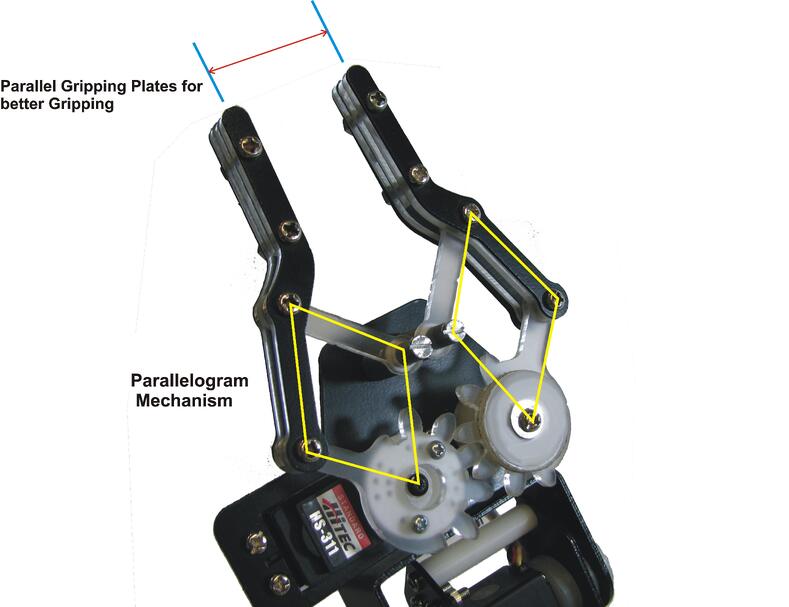
The etymology of the phrase, parallel gripper, relates to the fact that the gripper's fingers will remain in perfect parallelism throughout all the gripper's opening and closing movements. A parallel gripper is generally used for pick and place operations where parts have a predictable geometry.

Buy Parallel gripper HGPM online Festo USA
A parallel gripper that can grasp an object notjust between the fingers, using the linear trajectory, but also in front of the fingers, using the curved trajectory, is proposed. With an aim to make it dust-and-waterproof, the link structure is designed to combine two mechanisms consisting of only revolute pairs, called the Chebyshev's lambda mechanism and double parallel link. The former.
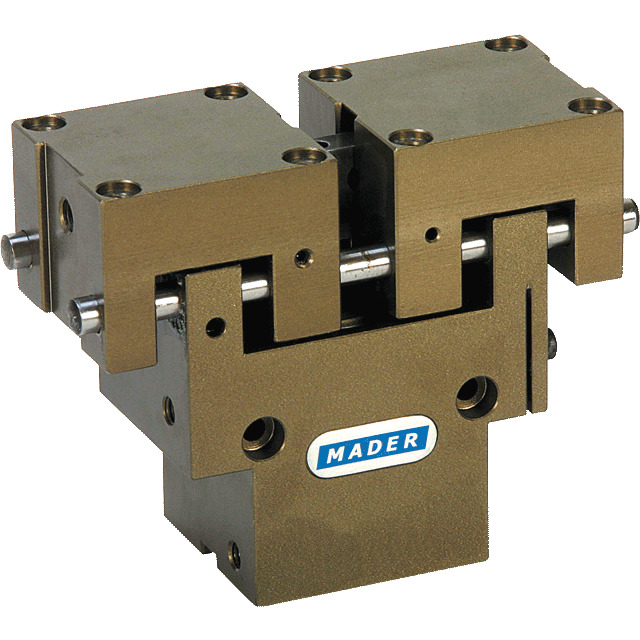
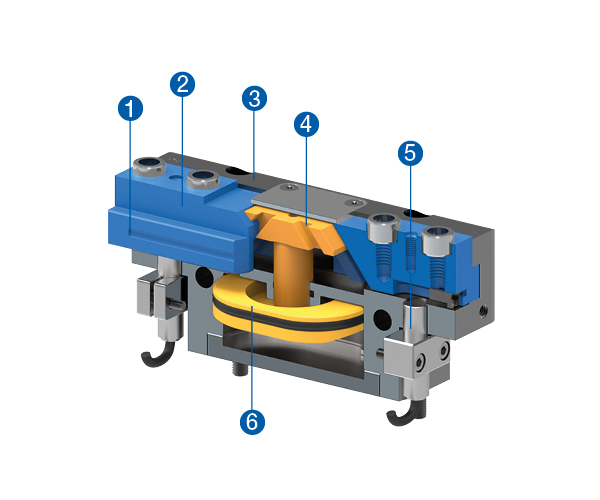
Parallel gripper PGR sturdy design Mader Shop pneumatics & compressed air technology
A new parallel-type gripper mechanism is proposed in this work. This device has a parallelogramic platform that can be flexibly folded. Therefore, this mechanism not only can be used to grasp an.

Rigged long parallel gripper model TurboSquid 1310939
mechanical. There are no additional requirements for power cables or air tubes. There is also no special requirements for robotic end-e ectors. The tool could be used by any robots with 2-finger parallel grippers. The features of the design are: 1) The tool is mechanical and is only manipulated and actuated by robotic grippers.

Parallel robot gripper Diekmann Engineering
Parallel gripper From micro assembly to heavy-load handling Our standard parallel grippers include small parts, universal, long-stroke, and sealed grippers for safe and precise handling of workpieces.
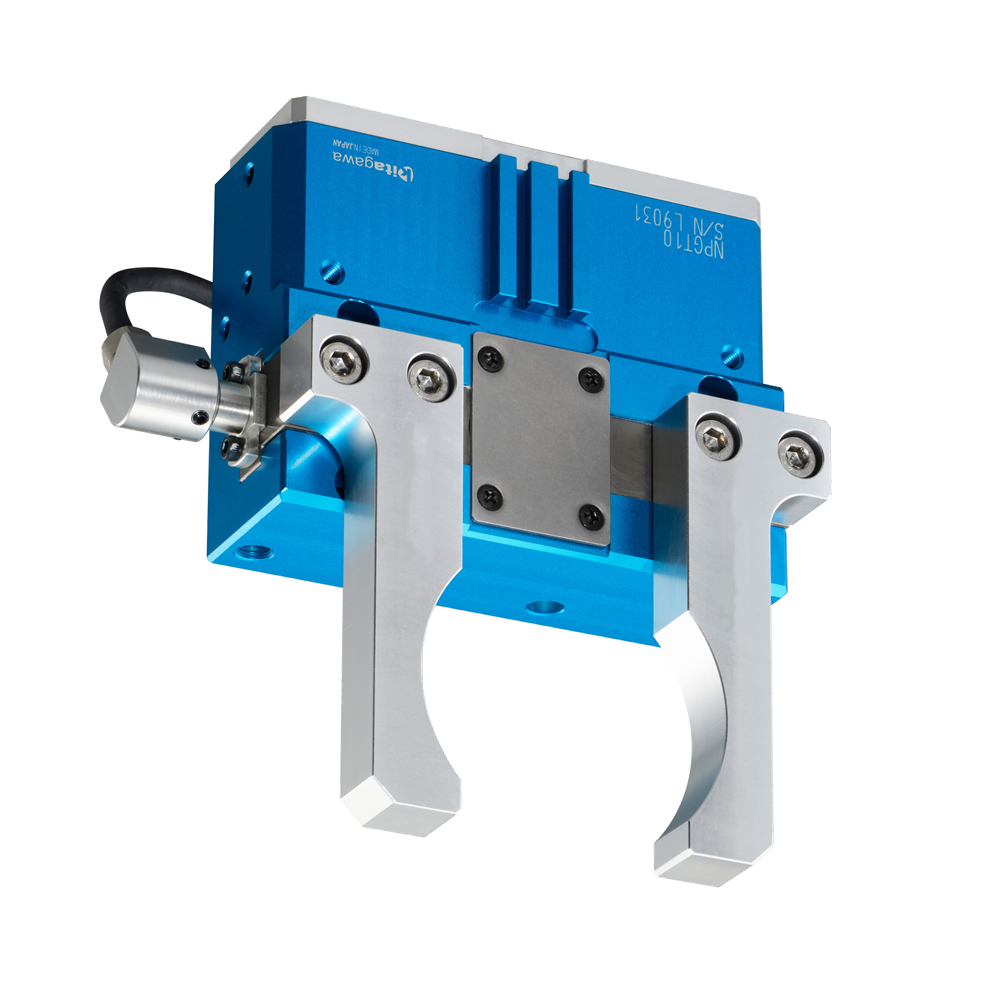
2jaw parallel gripper NPGT_S series by Kitagawa News
This article develops a mechanical screwing tool and its manipulation policies for two-finger parallel robotic grippers. The tool is based on a combined scissor-like element (SLE) and double-ratchet mechanism that converts the gripping motion of two-finger parallel grippers into a continuous rotation to realize tasks like fastening screws. The tool is entirely mechanical. There is no need for.

Parallel Gripper Kit Assembly Instructions YouTube
A gripper design is adapted to offer grasping and scooping capabilities to a parallel robot. This enables the parallel robot to manipulate not only large objects, but also thin objects lying on flat surfaces. Moreover, this gripper is driven directly by the redundant degrees of freedom of the parallel robot to which it is integrated.

Parallel Gripper P5GR Series (high precision) Parker NA
In this paper, an idea of modular design is proposed to devise a compliant microgripper with two degree-of-freedom (2-DOF) along with parallel translational motion of the gripper arms.
How Does a Parallel Robot Gripper Work?
This article develops a mechanical screwing tool and its manipulation policies for two-finger parallel robotic grippers. The tool is based on a combined scissor-like element (SLE) and double.

Active Parallel Gripper Active8 Robots
Article 12 February 2019 Design and analysis of the gripper mechanism based on generalized parallel mechanisms with configurable moving platform Article 16 November 2021 Conceptual Design and Kinematic Analysis of a Novel Parallel Manipulator with an Articulated Gripping Platform Chapter © 2016 Abbreviations X F :

Parallel gripper from ASUTEC for precise handling
A compliant gripper with nearly parallel gripping motion is developed by a topology synthesis and a dimensional synthesis approach. The topology synthesis process can generate linkage-type compliant mechanisms. Suitable boundary conditions of the topology synthesis process are selected to achieve the desired functions of the device.

How to Choose a Parallel Gripper for My Robot?
A new parallel-type gripper mechanism is proposed in this work. This device has a parallelogramic platform that can be flexibly folded. Therefore, this mechanism not only can be used to grasp an object having irregular shape or large volume, but also can be utilized as a micro-positioning device after grasping objects.

2131 SMC Low Profile Parallel Gripper
Abstract—Parallel-jaw robot grippers can grasp almost any object and are ubiquitous in industry. Although the shape, texture, and compliance of gripper jaw surfaces affect grasp robustness, almost all commercially available grippers provide a pair of rectangular, planar, rigid jaw surfaces.

2 Jaw Guided Parallel Gripper GU Series Tecnair
A new parallel-type gripper mechanism is proposed that has a parallelogramic platform that can be flexibly folded and not only can be used to grasp an object having irregular shape or large volume, but also can be utilized as a micro-positioning device after grasping objects. View on SAGE researchgate.net Save to Library Create Alert Cite